|
航空管制用の二次監視レーダーのModeSデータを用い高層気象観測を始めました。
気象予報精度を上げるためには、地表の気象観測のみならず、上空の高層気象観測を充実する必要があります。いくらスーパーコンピュータの性能が向上しても、基本となる観測値が充実していなければなりません。高層気象観測は現在ラジオゾンデとよばれる風船を飛ばし、世界各地で毎日決まった時刻(日本標準時09時・21時)に行われており、日本気象庁では、全国16か所の気象官署や昭和基地で実施しています。
一方上空では多数の民間航空機が飛んでおり、無線で様々な情報を送信しています。航空機にとって、気象情報は大変重要で、たえず大気圧、外気気温、風向、風速を計測してそれにしたがって飛行しています。そのため良い精度で計測していると考えます。航空機は気象センサーと考え高層気象観測に活用できないか、以前から考えていました。ヨーロッパではオランダ航空局、イギリス気象庁を中心に航空機から得られる気象データを気象予報に活用が図られているといいます。
2016年ごろから当研究所ではACARS(Aircraft Communications Addressing and Reporting System)という業務用無線を受信し、そのなかから気象通報だけを取り出す仕組みを作り運用してきました。ACARSとは、音声通信に代わる通信手段で航空会社の業務用のデジタル・デ−タリンクシステムです。その中に気温、風速、風向など報告するデータが含まれる時があります。しかしながら通信内容は航空会社の社内連絡が多く、気象情報は多くありません。また通信傍受という問題がなくはありません。
今回新たに開発したのは、航空管制用の二次監視レーダーのModeSを用いる方法です。飛行中の民間航空機の現在位置をリアルタイム表示するウェブサイト、FrightRadar24などで用いられているADS-Bはその一部です。直接気象情報は送信されませんが、対気速度、対地速度、マッハ数などが送られてきます。それらを用い気象データを算出しようとするものです。すでにFrightRadar24などにフィードする1090Hzの受信システムは構築済みで、これから得られるデータを活用することを検討しました。(2024/06/19)
ModeSは航空機の管制業務(ATC)のためのものです。管制業務はレーダーによって行われますが、初期の反射電波の遅延時間から位置を特定するシステムとは異なり、二次監視レーダー
(SSR)といってデジタル化されたコマンドレスポンスによっています。 地上から1030 MHz 無線周波数を使用して問い合わせメッセージを送信し、航空機トランスポンダは
1090 MHz 無線周波数を使用して応答メッセージを送信します。1990 年代に導入されて以来さまざまな拡張がされ、Mode S communication
protocol としてICAOにより規定されています。丁寧な解説がこちらにあります。
| |
 |
ModeSは地上のATCレーダーからのコマンドに応答する形でメッセージを送信する
航空交通管制のほかローカルに設置した受信機によって収集できます。
図はこちら |
|
|
|
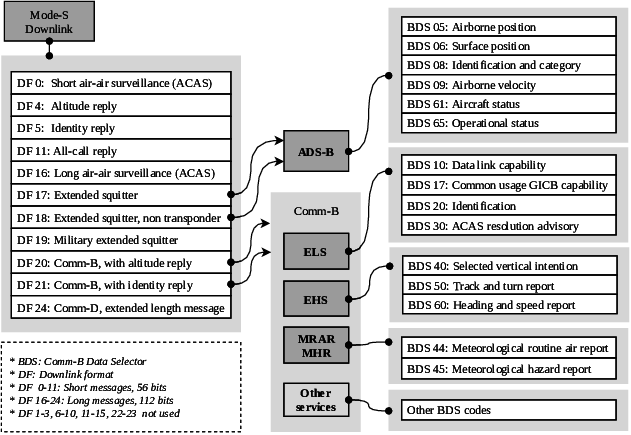
メッセージの長さは56ビットあるいは112ビットで、最初の 5 ビットは、メッセージのダウンリンク形式 (DF) 番号を定義します。DF 番号に基づいて、メッセジのさまざまな構造が提示されます。112ビットの場合DFをさらに細分化するための識別子がComm-B
Data Selector (BDS)です。
この中でDF=17がADS-B(Automatic Dependent Surveillance-Broadcast)で、地上からのレーダ応答ではなく、自律的、定期的に放送的に送信されるものです。1983
年の大韓航空 007 便事故後に米国が民間用に初めて提供した GPS などの全地球航法衛星システム (GNSS) によって実現されました。0.5秒ごとという高頻度でデータが送信されています。
航空機には、対気速度(ピトー静圧プローブを使用) 、対地速度、磁気方位、高度、気温など を測定するセンサーが搭載されています。これらのデータは生データとして送信されるわけではなく、航空管制に必要なデータとして、送信されています。ModeSの規格としては気象データを送信できるようになっていますが(BDS=44)、長期間受信してみましたところ実装された航空機はありませんでした。
航空機で使われる”速度”には次の6種類あります。
IAS、CAS、EAS、TAS、GS、マッハ数です。
IASとは、Indicated airspeedの略
指示対気速度。航空機は、ピトー管を使って対気速度を求めます。 ピトー管取り付け位置および機体姿勢の変化によって生じた速度の誤差は修正しておりません。この速度は対気速度計の指示に使われます。一般の飛行操作に用いられる速度です。
CASとは、Calibrated airspeedの略
較正対気速度。指示対気速度に、対気速度系統の誤差の補正を加えて得た速度のことをいいます。この速度は、主として航空機の速度規定(離陸および着陸速度など)に用いられます。
EASとは、Equivalent airspeedの略
等価対気速度といいます。CASに高度及び速度に対する空気の圧縮性の影響を補正して求められます。
飛行機の飛行高度と速度が小さい場合、圧縮性の影響は無視でき、CAS=EASとなります。
TASとは、True airspeedの略
真対気速度といいます。
乱れていない大気と航空機の相対速度で、EASにその高度における空気密度比の修正を加えて得られます。この速度は航法に用いられます。
GSとはGround speedの略
飛行中の航空機の地表面に対する相対的な水平速度をいい、対気速度と区別して用いられます。対地速度は真対気速度に飛行経路に対する風速成分を加味して求められます。地面に対して、どれくらいの速度なのかを表したものがこちらです。
車などのスピード計がこれにあたります。
また重要な速度の数値としてマッハ数があります。
mach number(マッハ数)
対気速度を音速の倍数で表した数値をマッハ数またはマックナンバーと呼びます。
航空機における方位はつぎのものがあります。
magnetic heading、track angle
magnetic heading
機首方向。 磁北による機首方位
track angle
トラック角度。 真北に対する進路角
ここで航空機の方位は進行方向(to)で表され、通常の気象で使われる風向(from)とは180°異なります。また角度の測り方は北から時計回りとなっていますが、コンピュータの数学関数で使われる
x 軸から反時計回りの角度と異なります。さらに対地速度は磁北を使っており、真北に補正する必要があります。補正数(magneticdeclination)はこちらによります。
これらの点を考慮してプログラムを作っていくことになります(少々苦労しました)。
マッハ数は対気速度の音速に対する比です。音速は気温によって変化しますから、マッハ数と対気速度がわかれば、気温を逆算できるはずです。
空気中を伝わる音速aは絶対温度 Tの関数で
a = sqrt(k * R * T / M)
ここで
比熱比 k = 1.403 (空気)
分子量 M = 28.966E-3 kg/mol (空気)
気体定数 R = 8.314462
絶対温度 T = 273.15 + t℃
マッハ数Maは対気速度Asとして
Ma = As / a
気温 t についてとけば
t = (As /Ma)^2 * K -273.15
ここで
k = M / k /R = 0.0024831
気温は対気速度とマッハ数から求めることができます。
風向・風速については、次のように求めます。航空機の機体は風の影響を受け、風によって流され、対気速度と、対地速度の差が生じます。ベクトル的に対気速度と、対地速度の差を計算すれば、風向と風速が計算できます。
 |
|
|
|
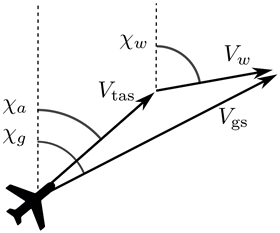 |
Vtas:true air speed
Vgs:ground speed
Vw:風速
χa:magnetic heading
χg:track angle
χw:風向 |
|
|
|
今回使用するデータは次のとおりで、格納されているModeSメッセージのなかから取り出すことになります。
| 名称 |
英語 |
格納場所 |
| 高度 |
altitude |
DF=17 (ADS-B) |
| 緯度・経度 |
latitude / longitude |
DF=17 (ADS-B) |
| トラック角度 |
trackangle |
DF=21 BDS=50 |
| 対地速度 |
groundspeed |
DF=21 BDS=50 |
| 真対気速度 |
true air speed |
DF=21 BDS=50 |
| 機首方向 |
magnetic heading |
DF=21 BDS=60 |
| 指示対気速度 |
indicated air speed |
DF=21 BDS=60 |
| マッハ数 |
mach number |
DF=21 BDS=60 |
このほか基本的な情報として、ICAOアドレスがあります。国際民間航空機関(ICAO)は、ModeSのANNEX10を規定する際、航空機アドレスの割当てに関して、次のように規定しています。
(1)各航空機に個別のアドレスを割当てること。
(2)航空機アドレスは24ビットで構成すること。
さらに日本の国土交通省は
(3)日本の国別アドレスは先頭6ビットを100001(8進数で41)とし、残りの18ビットは日本の航空機登録機関が重複しないよう任意に割当てることができる。
今回のModeSメッセージを処理プログラムは、すべてICAOアドレスをキイとして行います。
ModeS受信用のアンテナ、USB受信スティック、デコーダはADS-B用のものと共用します。図のRaspberryPi #1にadsbexchange-feed をインストールしてあり、その中のreadsbデコーダをつかいます。より一般的なdump1090でもかまいません。TCP/IPのいくつかのポートにデコーダ出力が出ていますが、ポート番号30002を用います。
今回モードSデータを処理するためRaspberryPi #3を新設します。かなりの処理能力が必要で、RaspberryPi モデルB4を用いました。(最繁時CPU使用率は30%になります)
SDカード:16GB (かなりのデータを吐き出します)
OS:Legacy 64bit Debian Bullsage (debian 11.9)
SSH、VNC、sambaを使います
コンピュータ名 :modeS
IPアドレス:固定 192.168.1.zz
readsbデコーダはdump1090と同様に事実上の標準である 3 つの異なる出力形式をサポートしています
Beastバイナリ形式は、FR24 や PiAware などのフィーダーを含む大多数のアプリケーションがデータに使用する形式です。このデータ用にポート 30005
で TCP サーバーを提供します。
Beast AVR 形式は、生データ バイトを 16 進数に変換したものです。各パケットはアスタリスクで始まり、16 進バイトが続き、セミコロン、キャリッジ リターン、およびライン
フィードで終わります。このデータ用にポート 30002 で TCP サーバーを提供します。
SBS /BaseStation 形式は人間が判読可能で、CSV ファイルや NMEA-0183 に似ています。残念ながら他の形式で利用できるすべてのデータが含まれているわけではありません。このデータ用にポート 30003 で TCP サーバーを提供します。
今回は処理しやすいBeastAVR形式を用います。たとえば
*80E190325883271F6A80902AE38C;
のような形式です。
ハードの準備ができたら、#1のRaspberryPiと#3のRaspberryPiが通信できることを pingコマンドで確認したうえで、#3のRaspberryPi上でつぎのようなPythonプログラムを実行し、TCP/IP通信ができること、BeastAVR形式が読めることを確認します。
。
| 通信確認プログラム modeStest.py |
# (C) 2024/06/19 Dr.Hiroshi Ishikawa
import socket
def main():
host = "192.168.1.xx"#RaspberryPi #1のアドレス
port = 30002
n = 0
try:
with socket.socket(socket.AF_INET, socket.SOCK_STREAM) as s:
s.connect((host, port))
print(f"Connected to {host} on port {port}")
while n <= 10:
data = s.recv(1024)
if not data:
break
while b'\n' in data:
line, data = data.split(b'\n', 1)
print(line.decode())
n = n + 1
except Exception as e:
print(f"An error occurred: {e}")
if __name__ == "__main__":
main()
|
$ python modeStest.py
Connected to 192.168.1.118 on port 30002
*8D846748EA36C85E935C08443E5A;
*5D846748D2AD2C;
*5D781DE8BB3E85;
*8D84B81C990DAD8A90083884D4F9;
*02E193B8039820;
*8D84B75D990D04A6B80834DBFCC4;
*28001D2E03D5E2; |
このような16進出力が得られるはずです。頭の * と最後の ; は制御用でこれを除くと、短いメッセージは56ビット、長いメッセージは112ビットです。
ModeS 通信プロトコルは、さまざまな種類のメッセージ形式を処理できるように設計されています。メッセージの最初の 5 ビットは、メッセージのダウンリンク形式
(DF) 番号を定義します。DF 番号に基づいて、メッセージのさまざまな構造が提示されます。表1.1に、使用可能なすべてのモード S 形式を示します。
今回もちいるDF番号16以降の112ビットの長いメッセージは、次のようなフォーマットです。
+----------+----------+-------------+------------------------+-----------+
| DF (5) | CA (3) | ICAO (24) | ME (56) | PI (24) |
+----------+----------+-------------+------------------------+-----------+
ここで
DF : Downlink Format
CA : Transponder capability
ICAO; aircraft address
ME: Message
PI: Parity/Interrogator ID
PyModeS は、Mode S (ADS-B を含む) メッセージをデコードするために設計された Python ライブラリです。これは、デルフト工科大学の
Junzi Sunを中心に開発されたもので、ソースコードがGitHubで公開されていますので、一から作る必要がなく、大変助かります。ライブ トラフィック データを表示および保存するためのスタンドアロン ツールとして使用することもできますが、ここではデコード機能だけをつかいます。解説はこちら
1.ダウンロード
https://github.com/junzis/pyModeS の <>Code ボタンをクリックしDownloadZIP でダウンロード
展開しその中の pyModeS ディレクトリを RaspberryPi #3のホームディレクトリにコピー
2.テスト
RaspberryPi #3のコンソールから次のような試験を行います。
pythonを起動し、pyModeSをインポートし、いくつかfunctionを使ってみます。
上で例示したメッセージのデコードしてみます。
df機能を使ってDFが17、bds.infer機能を使ってBDSが09、すなわちADSBメッセージのAirborne velocityであることがわかります。
pi@modeS:~ $ python
Python 3.11.2 (main, Mar 13 2023, 12:18:29) [GCC 12.2.0] on linux
Type "help", "copyright", "credits" or "license" for more information.
>>> import pyModeS as pms
>>> pms.df("8D84B81C990DAD8A90083884D4F9")
17
>>> pms.bds.infer("8D84B81C990DAD8A90083884D4F9")
'BDS09
|
さらにtell機能により、全体の意味は次のようでGround speedが示されます。
>>> pms.tell("8D84B81C990DAD8A90083884D4F9")
Message: 8D84B81C990DAD8A90083884D4F9
ICAO address: 84B81C
Downlink Format: 17
Protocol: Mode-S Extended Squitter (ADS-B)
Type: Airborne velocity
Speed: 435 knots
Track: 259.0251267445889 degrees
Vertical rate: 64 feet/minute
Type: Ground speed
|
ModeSのBDS50の例を示します。Track angle、 Ground speed True airspeed、がみえます。
>>> pms.tell("A80006ACF9363D3BBF9CE98F1E1D")
Message: A80006ACF9363D3BBF9CE98F1E1D
ICAO address: 4008B4
Downlink Format: 21
Protocol: Mode-S Comm-B identity reply
Squawk code: 6322
BDS: BDS50 (Track and turn report)
Roll angle: -9.66796875 degrees
Track angle: 140.2734375 degrees
Track rate: -0.40625 degree/second
Ground speed: 476 knots
True airspeed: 466 knots
|
ModeSのBDS60の例を示します。Megnatic Heading、 Indicated airspeed、 Mach numbe が見えます。
>>> pms.tell("A80004AAA74A072BFDEFC1D5CB4F")
Message: A80004AAA74A072BFDEFC1D5CB4F
ICAO address: 4CA53F
Downlink Format: 21
Protocol: Mode-S Comm-B identity reply
Squawk code: 4720
BDS: BDS60 (Heading and speed report)
Megnatic Heading: 110.390625 degrees
Indicated airspeed: 259 knots
Mach number: 0.7000000000000001
Vertical rate (Baro): -2144 feet/minute
Vertical rate (INS): -2016 feet/minute
|
このほかのpyModeSのすべての機能についてはこちらにあります。
RaspberryPi #3で動かす本番プログラムを作成します。Beast AVR 形式のデータから次のデータを取り出す必要があります。
adsbメッセージから ICAO,altitude,latitude,longitude
bds 50から ICAO,trackangle,groundspeed,trueair
bds 60から ICAO,heading,indicatedair,mach
adsbは1秒に2回、modeSデータは数秒に1回送信されます。1つの機体から別々のメッセージでデータが出力されるので、これらをICAOアドレスごとに一つの[icao,adsbデータ,bds50データ,bds60データ]という形に整理しないといけません。この「名寄せ」のようなもので、そのためのサブプログラムがaircraft(icao , code, data)関数です。
| 本番用プログラム modeSdata.py |
# (C) 2024/06/19 Dr.Hiroshi Ishikawa
import socket
import pyModeS as pms
import os
from datetime import datetime
import time
#処理中の航空機のリスト [icao,adsbデータ,bds50データ,bds60データ]
aircrafts = [
[0,0,0,0],
]
#受信データを1行分切り出す関数
def receive_lines(sock):
buffer = b'' # 受信データを格納するバッファ
while True:
data = sock.recv(1024) # 1024バイトごとにデータを受信
if not data: # データが空の場合は接続が切断されたと判断してループを終了
print(timestamp() + " no data")
break
buffer += data # 受信したデータをバッファに追加
while b'\n' in buffer: # 改行文字が含まれるかチェック
line, buffer = buffer.split(b'\n', 1) # バッファから1行分のデータを切り出す
yield line.decode() # 1行分のデータをyieldする
if buffer: # バッファに残っているデータがある場合はそれを処理する
yield buffer.decode()
#航空機リストをICAOアドレスごとに整理する関数
def aircraft(icao , code, data):
global aircrafts #航空機リスト
try:
index = search_icao(aircrafts, icao) #aircraftsリストを検索しICAOが見つかるとリストの何番目かが返える
if index is not None:#リストにICAOが見つかった場合
aircrafts[index][0] = icao #0番目にicaoを代入
if code == 1:
aircrafts[index][1] = data #adsbの場合は1番目にadsbデータを代入
if code == 2:
aircrafts[index][2] = data #bds50の場合は2番目にbds50データを代入
if code == 3:
aircrafts[index][3] = data #bds60の場合は3番目にbds50データを代入
#航空機のadsb,bds50,bds60のデータがすべて整ったらタイムスタンプをつけてファイルに書き出す
if (aircrafts[index][1] != 0) and (aircrafts[index][2] != 0) and (aircrafts[index][3]!= 0) :
result = aircrafts[index][0] + "," + str(aircrafts[index][1])+ "," + str(aircrafts[index][2]) + "," + str(aircrafts[index][3])
filename = "modeSdata/" + datetime.now().strftime("%Y%m%d%H")+ "modeS_data.txt"#1時間に1ファイル
with open(filename, "a" ) as f:
f.write(timestamp() + "," + result + "\n")
f.close()
del aircrafts[index]
#航空機リストにゴミがたまり50以上になったら古い10のリストを削除する
if len(aircrafts) > 50:
del aircrafts[0:9]
else:#見つからないときは新しい航空機であるからリストに次の値を追記する
if code == 1:
aircrafts.append([icao,data,0,0])
if code == 2:
aircrafts.append([icao,0,data,0])
if code == 3:
aircrafts.append([icao,0,0,data])
""" 航空機リストの挙動を画面で確認するときはコメントアウトを解除
os.system('clear')
for i in aircrafts:
print(i)
"""
except Exception as e:
print(timestamp() + f" aircraft error : {e}")
#search_icao(aircrafts, icao)とすればaircraftsリストを検索しicaoが見つかるとリストの何番目かを返す
def search_icao(list, icao):
for index, info in enumerate(list):
if info[0] == icao:
return index
return None
def timestamp():
return datetime.now().strftime("%Y/%m/%d %H:%M:%S")
def main():
# ホストとポート番号
host = "192.168.1.xx" #RaspberryPi #1のアドレス
port = 30002 #ポート番号は 30002
global aircrafts #航空機リスト
try:
# ソケットを作成し、ポート30002に接続
with socket.socket(socket.AF_INET, socket.SOCK_STREAM) as s:
s.settimeout(20) #航空機が飛ばない時間帯があるのでタイムアウトを設定
s.connect((host, port))
print(timestamp() + f" Connected to {host} on port {port}")
lat_ref = 35.0 #大まかな位置情報が必要
lon_ref = 139.0
icao = ""
alt = 0.0
lat = 0.0
lon = 0.0
mach =0.0
tas = 0.0
for line in receive_lines(s):#1行すなわち1メッセージを受信
msg = line[1 : -1]#先頭の*と最後の;を取り除く
if pms.df(msg) == 17:#DF=17すなわちADSBの場合
icao = str(pms.icao(msg))#icaoアドレス
if pms.adsb.altitude(msg) != 0:
alt = pms.adsb.altitude(msg)#高度
lat = pms.adsb.position_with_ref(msg, lat_ref, lon_ref)[0]#緯度
lon = pms.adsb.position_with_ref(msg, lat_ref, lon_ref)[1]#経度
#aircraft関数をよび航空機リストに書き込む。(alt, lat, lon)はタプル
aircraft(icao ,1, (alt, lat, lon))#
elif pms.bds.bds50.is50(msg):#BDS=50の場合
icao = str(pms.icao(msg))#icaoアドレス
trackangle = pms.commb.trk50(msg)
groundspeed = pms.commb.gs50(msg)
trueair = pms.commb.tas50(msg)
aircraft(icao ,2, (trackangle, groundspeed, trueair))
elif pms.bds.bds60.is60(msg):#BDS=50の場合
icao = str(pms.icao(msg))#ICAOアドレス
heading = pms.commb.hdg60(msg)
indicatedair = pms.commb.ias60(msg)
mach = pms.commb.mach60(msg)
aircraft(icao ,3, (heading, indicatedair, mach ))
except Exception as e:
print(timestamp() + f" error: {e}")
finally:
print(timestamp() + " socket closed")
s.close()
if __name__ == "__main__":
while True:
print(timestamp() + " start")
main()
time.sleep(30)
|
ホームディレクトリに modeSdata というフォルダーを作っておきます。
次のように起動します。
pi@modeS:~ $ python modeSdata.py
2024/06/19 10:32:19 start
2024/06/19 10:32:19 Connected to 192.168.1.xx on port 30002
|
1時間に1本
modeSdata/2024061909modeS_data.txt
というファイルができます。
出力ファイルは1航空機に対し次のような形式です。()はpythonのタプル
yyyy/MM/dd HH:mm:ss,ICAO,(altitude,latitude,longitude),(trackangle,groundspeed,trueair),(heading,indicatedair,mach)
気温、風向・風速を算出するプログラムは、Windowsの親機で実行することとしました。Javaで作りました。上で述べた、重要な気温算出、風の計算はプログラムのおしまいにある5つのサブプログラム(メソッド)です。
trueAirSpeedと double machから気温を算出
double temperature(double trueAirSpeed, double mach)
trackangle とgroundspeedと headingと trueairspeedから風のx成分を算出
double wind_x(double trackangle ,double groundspeed, double heading, double
trueairspeed)
trackangle とgroundspeedと headingと trueairspeedから風のy成分を算出
double wind_y(double trackangle ,double groundspeed, double heading, double
trueairspeed)
風のx成分と風のy成分から風向を求める
double windangle(double speedx ,double speedy)
風のx成分と風のy成分から風速を求める
double windspeed(double speedx ,double speedy)
数分に1回動かします。標高100mごとに集計し平均し、図に描くようにしていますが、この部分は省略します。
| 気温、風向・風速を算出するプログラム modeS_weatherdata.java |
/* (C) 2024/06/19 Dr.Hiroshi Ishikawa
* 1時間分のyyyyMMddHHmodeSdata.txtを集計
*出力は yyyyMMddHHmodeS_weather.csv
*/
package adsb;
import java.io.*;
import java.text.SimpleDateFormat;
import java.util.Calendar;
class modeS_weatherdata{
public static void main(String args[]) throws IOException {
SimpleDateFormat DF = new SimpleDateFormat("yyyyMMddHH");
Calendar cal = Calendar.getInstance();
String yyyyMMddHH = DF.format(cal.getTime());//今
String filename0 = "D:\\MyDocuments\\adsb\\modeSweather\\" + yyyyMMddHH + "modeS_weather.csv";//出力ファイル
String filename1 = "\\\\192.168.1.zz\\pi\\modeSdata\\" + yyyyMMddHH + "modeS_data.txt";//入力ファイル zzは RaspberryPi#3のアドレス
String ss1 ="" ;
String[] strAry = new String[40];
String Time = "";
String icao = "";
double altitude = 0.0;
double latitude = 0.0;
double longitude = 0.0;
double trackangle = 135.0;
double groundspeed = 14.0;
double heading = 180;
double trueairspeed = 10;//m/s
double mach = 0.0;
double speedx = 0.0;
double speedy = 0.0;
double temperature = 0.0;
try {
File f0 = new File(filename0);
PrintWriter output0 = new PrintWriter(new BufferedWriter(new FileWriter(f0)));
//2024/05/31 00:00:02,AC2D32,(33000, 35.56581115722656, 137.96710968017578),(57.3046875, 524, 494),(59.765625, 293, 0.8240000000000001)
//yyyy/MM/dd HH:mm:ss,ICAO,(altitude,latitude,longitude),(trackangle,groundspeed,trueair),(heading,indicatedair,mach)
File f1 = new File(filename1);
BufferedReader input1 = new BufferedReader(new FileReader(f1));
while ((ss1 = input1.readLine()) != null){
ss1 = ss1.replace("(", "");//タプルのカッコを取り除く
ss1 = ss1.replace(")", "");//タプルのカッコを取り除く
ss1 = ss1.replace("None", "0");
strAry = ss1.split(",");//カンマ区切りをstrAryにいれる
Time = strAry[0];
icao = strAry[1];
if (!(strAry[2].equals("None"))){ altitude = Double.parseDouble(strAry[2]) * 0.3048; }//feetをmに換算
if (!(strAry[3].equals("None"))){latitude = Double.parseDouble(strAry[3]);}
if (!(strAry[4].equals("None"))){longitude = Double.parseDouble(strAry[4]);}
if (!(strAry[5].equals("None"))){trackangle = Double.parseDouble(strAry[5]);}
if (!(strAry[6].equals("None"))){groundspeed = Double.parseDouble(strAry[6]) * 0.514 ;}//ノットをm/sに換算
if (!(strAry[7].equals("None"))){ trueairspeed = Double.parseDouble(strAry[7]) * 0.514 ;}//ノットをm/sに換算
if (!(strAry[8].equals("None"))){heading = Double.parseDouble(strAry[8]);}
if (!(strAry[10].equals("None"))){mach = Double.parseDouble(strAry[10]);}
temperature = temperature(trueairspeed, mach) ;
speedx = wind_x(trackangle , groundspeed, heading, trueairspeed) ;
speedy = wind_y(trackangle , groundspeed, heading, trueairspeed);
if (((latitude <= 36.5) && (latitude >= 34.75)) && ((longitude <= 140.5) && (longitude >= 137.5) )){//空域を限定
if (heading > 0 && trueairspeed > 0 && groundspeed > 0 && mach > 0 ){//ノイズ除去
output0.println(Time+ "," +icao +"," +altitude + "," + trackangle +"," +groundspeed +"," +heading + "," + trueairspeed + "," + temperature + "," + windspeed(speedx , speedy)+ "," + windangle( speedx , speedy));
}
}
}
input1.close();
output0 .close();
System.out.println(filename0 + "の書き込み終了");
}
catch(Exception e){
System.out.println("エラー: " + e + " " + ss1);
}
}
public static double temperature(double trueAirSpeed, double mach){//trueAirSpeedとmachから気温を算出
try{
double k = 1.403 ; //比熱比(空気)
double M = 28.966E-3; //分子量 kg/mol (空気)
double R = 8.314472;// 気体定数
double K = M / k / R;
return (trueAirSpeed /mach ) * (trueAirSpeed /mach ) * K - 273.15;
}catch(Exception e){
System.out.println( e );
return 0;
}
}
public static double wind_x(double trackangle ,double groundspeed, double heading, double trueairspeed){//風のx成分
double MAGNETIC_DECLINATION=7.64;//日本における磁気偏角
double ground_dir = 0.5 * Math.PI - Math.toRadians(trackangle) ;
double ground_x = groundspeed * Math.cos(ground_dir);
double air_dir = 0.5 * Math.PI - Math.toRadians(heading)+ Math.toRadians( MAGNETIC_DECLINATION );
double air_x = trueairspeed * Math.cos(air_dir);
return ground_x - air_x;
}
public static double wind_y(double trackangle ,double groundspeed, double heading, double trueairspeed){//風のy成分
double MAGNETIC_DECLINATION =7.64;
double ground_dir = 0.5 * Math.PI - Math.toRadians(trackangle) ;
double ground_y = groundspeed * Math.sin(ground_dir);
double air_dir = 0.5 * Math.PI - Math.toRadians(heading)+ Math.toRadians( MAGNETIC_DECLINATION);
double air_y = trueairspeed* Math.sin(air_dir);
return ground_y - air_y;
}
public static double windangle(double speedx ,double speedy){//風のx成分と風のy成分から風向を求める
return Math.toDegrees((0.5 * Math.PI - Math.atan2(speedy , speedx) + 2.0 * Math.PI + Math.PI ) % (2.0 * Math.PI)) ;
}
public static double windspeed(double speedx ,double speedy){//風のx成分と風のy成分から風速を求める
return Math.sqrt(speedx * speedx + speedy *speedy) ;
}
}
|
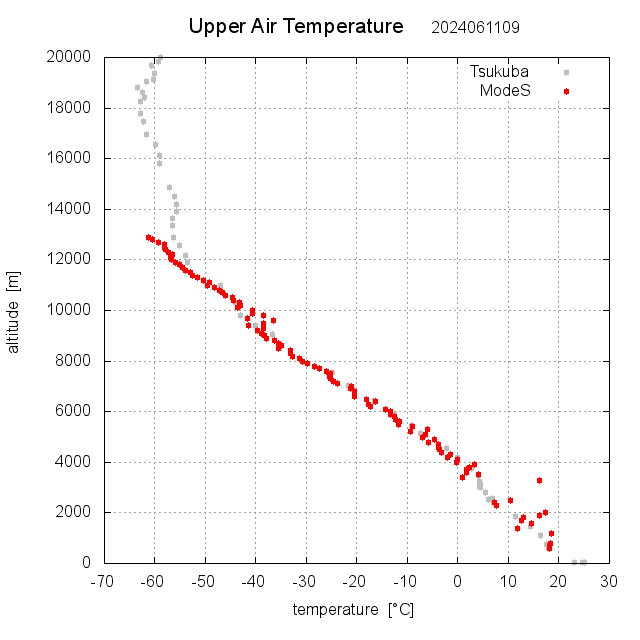
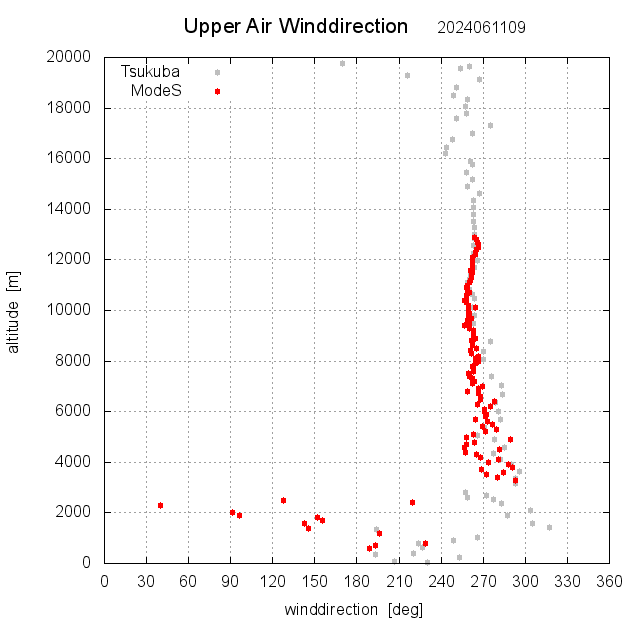
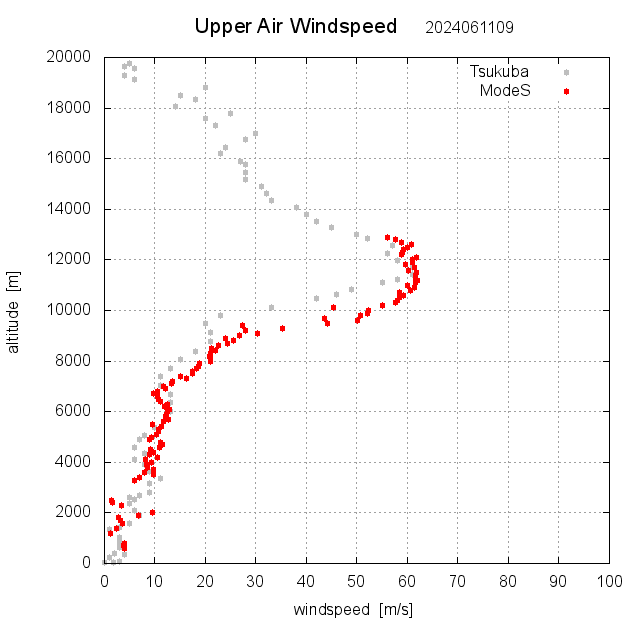
筑波館野高層気象台の計測データは気象庁ホームページで公開されています(ただし1日後に)。それと今回のデータを比較します。筑波館野高層気象台と日野は約80kmはなれていることを考慮すると、下のように温度、風速、風向ともに、よく一致しています。
ここで、筑波のデータは2024年6月11日の9時のラジオゾンデによる計測データ(最高高度に達するまで約1時間かかるので時間差がある)。当方日野のデータは、9時から9時59分まで間に受信した気象データを、標高100mごとに集計し平均化したものです。
この1時間の間に、90万メッセージを受信し、その中から5500の有意な気象データを抽出しています。一方その間のACRSからの気象データはわずか49個でした。
次のようにコメントできるでしょう。
1.ラジオゾンデは2万メートル以上の高度まで(風船が破裂するまで)計測されますが、最高高度に達するまで約1時間かかるそうです。航空機の巡航高度は最高1万2千メートル前後であり、限定されます。しかし、地表から高
さ約1万メートルまでの範囲を対流圏(troposphere)と言い、気象現象はほとんどこの中で起こっていますので充分です。
2.当地から東京国際空港(羽田)まで、35kmですが、低高度の航空機からの電波が受信できていません。そのため高度1000m以下のデータがあまり取れません。航空機の速度が低いと、得られる気温は誤差が多いようです。
3.航空機はラジオゾンデのように垂直に上昇するわけではなく、高高度では遠隔のデータを受信することがあります。広範囲の受信は必要ではなく、空域を限定すべきです。(緯度36.5〜
34.75、経度140.5〜 137.5にしています)
4.ラジオゾンデのように、1日に2回だけではなく、リアルタイムで有効な情報が得られます。
5.ただし、航空機の飛ばない深夜時間帯にはデーターがえられません。また、台風や雷雲を避けて飛行しますので、その中のデータは得られません。
6.データは、気温、風向、風速のみで、湿度はありません。
以上のことを配慮しても、多数のデータが得られ、コストがかからないので、航空機の気象データは大いに活用されるべきと考えます。
ナチュラル研究所のホームページではリアルタイムにModeSデータにもとずく高層気象を表示しています。高度1000m以下のデータを補完するため、ACARSデータを合わせて表示しています。さらに充実していくつもりです。
ModeSのメッセージは混雑時は衝突したり、伝送エラーのため、誤ったデータが受信される時があります。そのため現実的でない異常値が混ざる場合があり、適切なフィルター処理により、排除する必要があります。
また使用したpyModeSライブラリーはそのようなデータを受信したとき、ストール(プログラムが停止)する場合があります。回避する改良を加えたpyModeSを用意しています。問い合わせください。
|
 |